

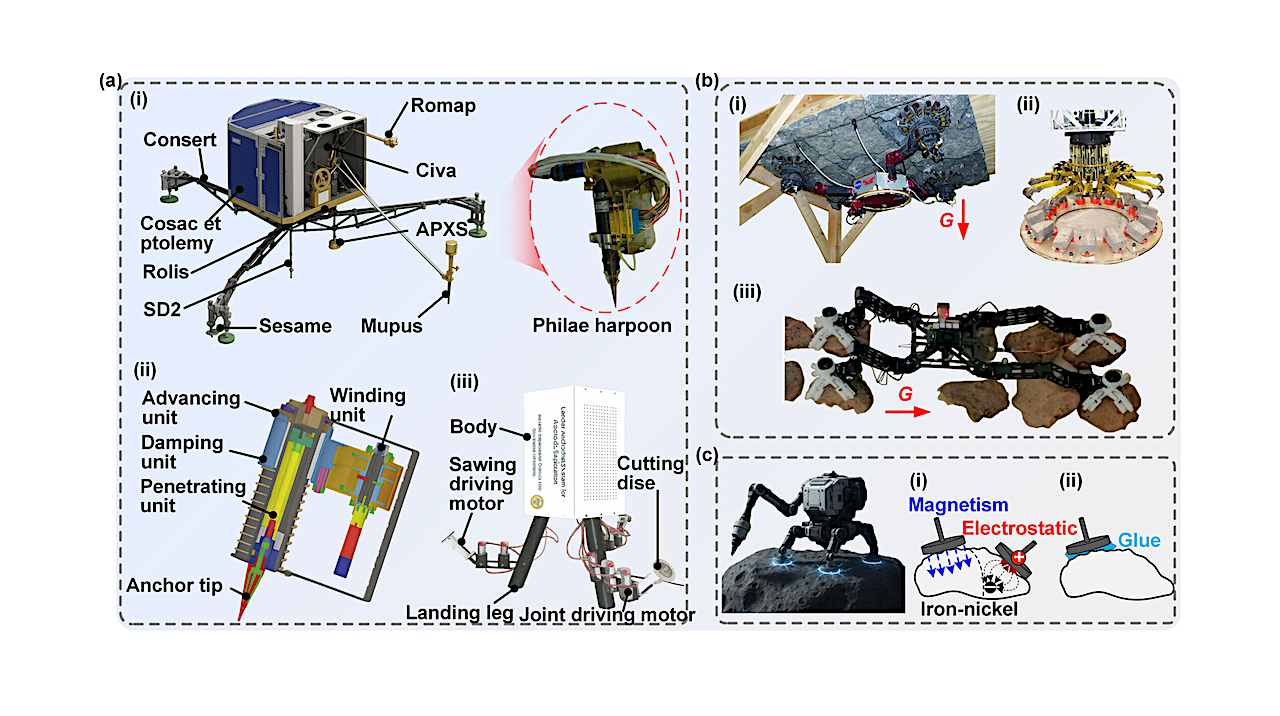
Representative anchoring mechanisms for small-body sampling robots. (a) Mechanical penetration. (i) Philae lander and its harpoon. Reproduced with permission [43] Copyright 2009, Elsevier. Reproduced with permission [63]. Copyright 2016, Elsevier. (ii) Philae-inspired prototype [112]. (iii) A lander anchoring system based on a sawing method for asteroid exploration. Reproduced with permission [113]. Copyright 2018, Elsevier. (b) Grasping-based anchoring. (i) Gravity-independent rock-climbing robot. Reproduced with permission [114]. Copyright 2013, Wiley. (ii) Nautilus gripper. Reproduced with permission [115]. Copyright 2020, Wiley. (iii) A gripper inspired by beetle claws. Reproduced with permission [116]. Copyright 2023, Elsevier. (c) Adhesive-based anchoring. (i) Field-based anchoring. (ii) Bonding anchoring. — SmartBot
Unlike planetary rovers operating on the Moon or Mars, robots working on asteroids and comets must interact with surfaces where gravity is extremely weak, terrain is highly irregular, and material properties are often unknown before arrival. Under these conditions, even a small sampling force, landing impact, or thruster disturbance may cause rebound, drifting, attitude instability, or loss of contact with the surface.
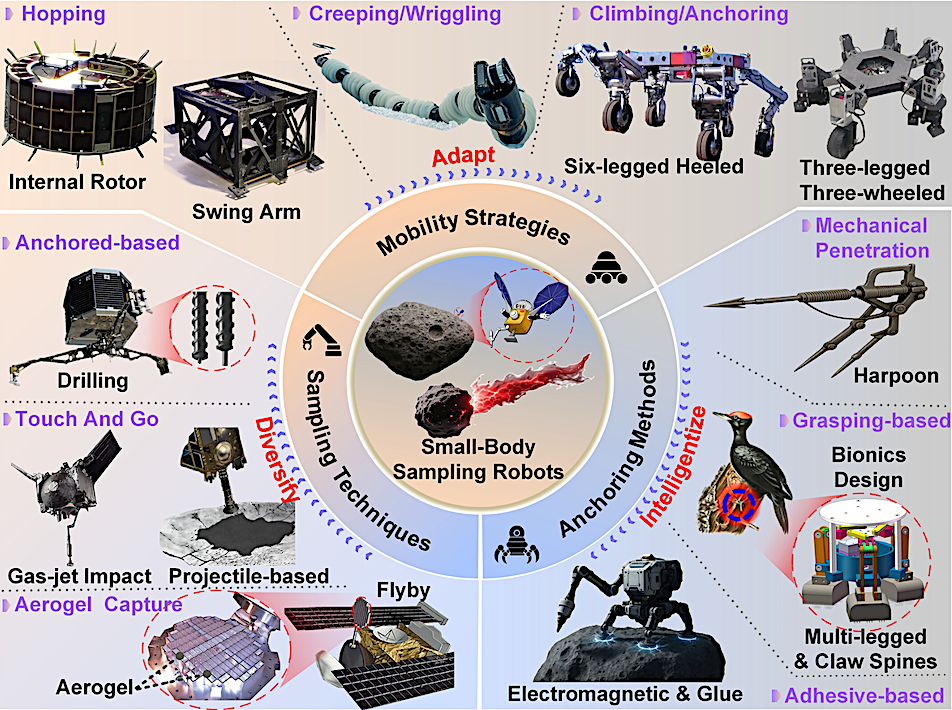
Graphical abstract: Functional and structural taxonomy of small-body sampling robots. — SmartBot
To address these challenges, small-body sampling robots rely on three closely related capabilities: obtaining samples, moving across the surface, and maintaining stable contact during operation. The review, titled “Sampling, Mobility, and Anchoring in Small-Body Sampling Robots: A Comprehensive Review,” systematically summarizes the development of these three technologies and discusses how they interact in real mission scenarios.
For sampling, the review classifies current approaches into touch-and-go sampling, landing/anchoring-assisted sampling, and non-contact sampling. Touch-and-go sampling has been successfully demonstrated in missions such as Hayabusa, Hayabusa2, and OSIRIS-REx, offering advantages of short contact time and relatively low operational risk.
Landing or anchoring-assisted sampling can support larger sample volumes and subsurface acquisition, but usually requires more complex system design and higher operational reliability. Non-contact sampling, which captures particles ejected from the surface without direct landing, may be useful for volatile-rich or high-risk surfaces.
For mobility, the review summarizes hopping, climbing or anchoring-assisted locomotion, creeping, wriggling, and other adaptive strategies. Because small bodies provide little gravity and limited traction, conventional continuous wheeled locomotion is often unsuitable.
Hopping and short-contact motion have therefore become practical routes for current and near-term missions, while bio-inspired crawling, anchoring-assisted mobility, and hybrid locomotion may offer greater adaptability for future complex terrains.
Anchoring is identified as a critical technology for ensuring stable operation. The review groups existing anchoring methods into mechanical penetration, grasping-based anchoring, adhesive-based anchoring, and hybrid anchoring.
The failed anchoring of the Philae lander on comet 67P/Churyumov–Gerasimenko is a reminder that a single anchoring strategy may be insufficient under uncertain surface conditions. Future systems may require intelligent multimodal anchoring that combines mechanical, bio-inspired, and adhesive mechanisms to adapt to crusted, rocky, dusty, or loosely packed surfaces.
A central message of the review is that sampling, mobility, and anchoring should not be treated as isolated modules. In microgravity, contact impulse, reaction force, attitude disturbance, surface interaction, and anchoring capacity are strongly coupled.
Sampling can induce rebound or drifting; mobility changes the contact state and stability boundary; insufficient anchoring can amplify the risk of system-level instability. Therefore, future small-body robots should move from “single-module optimization” toward “system-level co-design.”
The review further identifies several future directions for the field, including AI-powered autonomy, diversified and multimodal sampling, adaptive hybrid mobility, intelligent anchoring, modular and lightweight structures, and integrated optimization across the complete mission chain.
These developments are expected to support longer-duration, higher-frequency, and more reliable surface operations on small bodies, ultimately contributing to deep-space exploration, sample return missions, and future in situ resource utilization.
Sampling, Mobility, and Anchoring in Small-Body Sampling Robots: A Comprehensive Review, SmartBot (open access)
Astrobiology, Robotics,