

 Legged robot performing analogue tests in Marslabor at the University of Basel. Credit: Dr Tomaso Bontognali.
Legged robot performing analogue tests in Marslabor at the University of Basel. Credit: Dr Tomaso Bontognali.
Dr Gabriela Ligeza is a former PhD student from the University of Basel and now a postdoctoral researcher at the European Space Agency (ESA). With her colleagues, she recently tested a new strategy for semi-autonomous exploration of planets with a legged robot equipped with state-of-the-art measurement tools. The new system was designed to rapidly investigate multiple targets and collect mineralogical data.
The results, published in Frontiers in Space Technologies, showed that semi-autonomous robots can quickly investigate several targets, identify promising rocks, and return scientifically valuable data for astrobiology and in-situ resource utilization (‘living off the land’).
In this guest editorial, Ligezaexplains their findings for a wider audience.
Moving toward faster semi-autonomous operations
Planetary surface missions currently operate cautiously. On Mars, communication delays between Earth and rovers (typically between four and 22 minutes), as well as data transfer constraints due to uplink and downlink limitations, force scientists to plan operations in advance. Rovers are designed for energy efficiency and safety, and to move slowly across hazardous terrain. As a result, exploration is typically limited to only a small portion of the landing site, with rovers typically traveling up to a few hundreds of meters per day, which makes it difficult to collect geologically diverse data.
Here, we tested a different approach: a semi-autonomous robotic explorer which can investigate multiple targets one-by-one and collect data without constant human intervention. The results showed that semi-autonomous robots equipped with compact instruments could significantly speed up resource prospecting and the search for ‘biosignatures’ (ie, evidence of life) on planetary surfaces: instead of investigating a single rock under continuous supervision, a robot could walk toward multiple targets and autonomously perform measurements at each location.
Our research question was whether a robot equipped with a simple scientific payload could quickly study several targets while still delivering meaningful scientific results. The results proved that even relatively compact instruments can achieve the full scientific objective: identifying rocks relevant for astrobiology and resource exploration.
A robotic field test for future missions
To test the concept, we used the quadrupedal robot ‘ANYmal’ equipped with a robotic arm carrying two instruments: the microscopic imager MICRO and a portable Raman spectrometer developed for the ESA-ESRIC Space Resources Challenge. We carried out this work in collaboration with the Robotic Systems Lab at ETH Zurich, ETH Zurich | Space, the University of Zurich, and the University of Bern.
Read and download full article
We conducted our experiments in the ‘Marslabor’ facility at the University of Basel, which simulates planetary surface conditions using analogue rocks, ‘regolith’ (ie, planetary dust) materials, and analog lighting conditions. The robot autonomously approached selected targets, deployed the instruments with its robotic arm, and returned images and spectra for analysis.
The system successfully identified diverse rock types relevant to planetary exploration, including gypsum, carbonates, basalts, dunite, and anorthosite. Many of these are scientifically significant: for example, lunar-analog rocks such as dunite (rich in olivine and oxides), anorthosite (containing anorthite), and oxides such as rutile, may indicate valuable resources for future space missions.
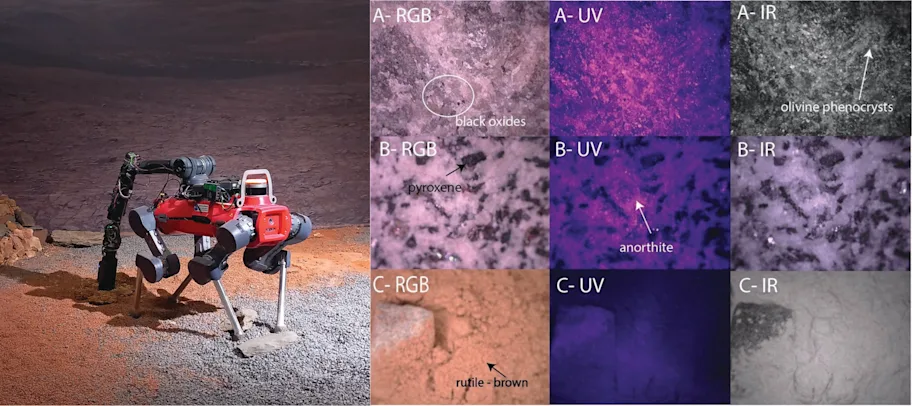 On the left: the robot performing autonomous measurements of a rock with MICRO and Raman. On the right: examples of images from the microscopic imager (MICRO) returned by the robot, showing the texture of three different lunar analogue materials in RGB, UV, and IR.Credit: Dr Gabriela Ligeza.Faster science with multi-target exploration
On the left: the robot performing autonomous measurements of a rock with MICRO and Raman. On the right: examples of images from the microscopic imager (MICRO) returned by the robot, showing the texture of three different lunar analogue materials in RGB, UV, and IR.Credit: Dr Gabriela Ligeza.Faster science with multi-target exploration
We compared two operational approaches: traditional single-target exploration guided closely by scientists, and a semi-autonomous multi-target strategy in which the robot performs measurements at several locations in sequence.
The semi-autonomous missions turned out to be much faster. Multi-target missions took between 12 and 23 minutes, while a human-guided mission required 41 minutes to complete comparable analyses.
Despite the faster pace, the robot achieved high scientific success rates. In one test run, all selected targets were correctly identified.
This approach could thus allow future missions to rapidly survey large areas of planetary surfaces. Scientists could then analyze incoming data and select the most promising locations for detailed investigation.
Instead of waiting for humans to command every step, robots could move through the terrain, scan rocks quickly, and collect data. This approach could allow us to conduct science much faster on planetary surfaces. Robots could rapidly explore and characterize many rocks, helping scientists pinpoint the most interesting samples for further investigation.
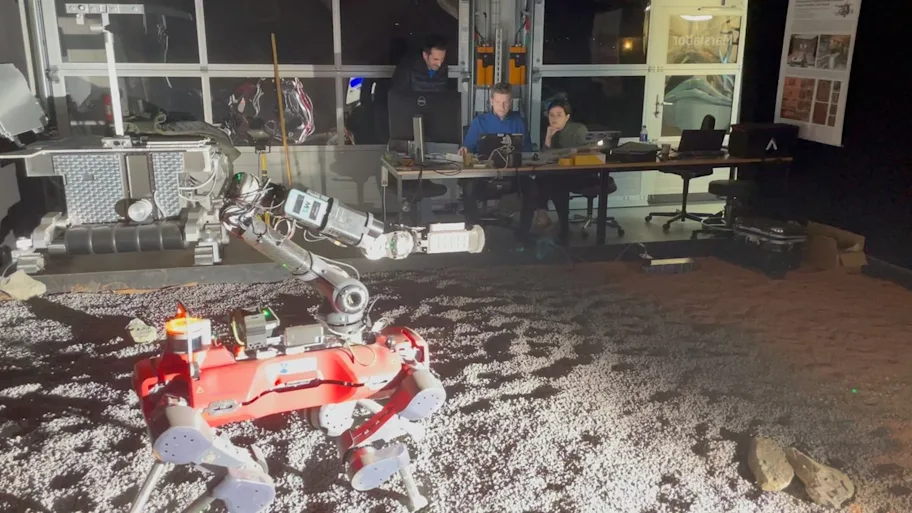 Setup of legged robot operation on the testbed, with the control room and operators in the background. Credit: Dr Tomaso Bontognali.
Setup of legged robot operation on the testbed, with the control room and operators in the background. Credit: Dr Tomaso Bontognali.
Preparing for future exploration
The study highlights how relatively simple instruments can provide valuable scientific information when integrated into autonomous robotic systems. Instead of relying solely on large and complex instrument suites, future missions could deploy agile robots that rapidly scan the environment and flag promising targets for detailed investigation.
As space agencies prepare for upcoming missions to the Moon, Mars, and beyond, such semi-autonomous systems could help scientists survey larger areas in less time, supporting both resource prospecting and the search for possible signs of past life.
REPUBLISHING GUIDELINES: Open access and sharing research is part of Frontiers’ mission. Unless otherwise noted, you can republish articles posted in the Frontiers news site — as long as you include a link back to the original research. Selling the articles is not allowed.